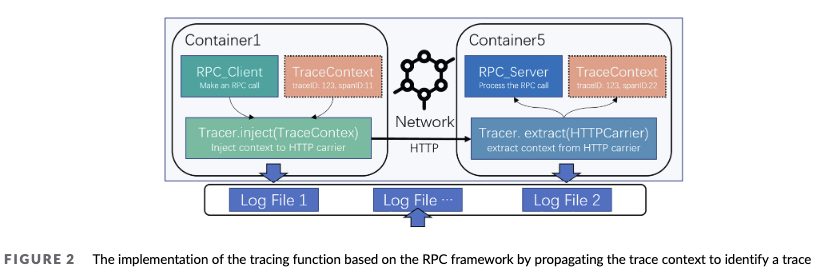
Figure 2 – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
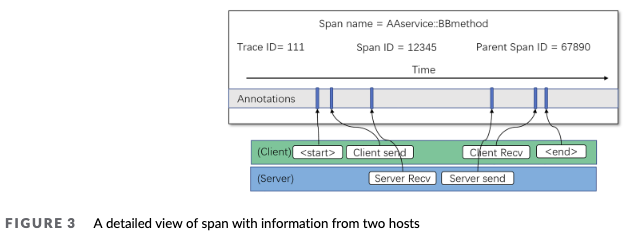
Figure 3 – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
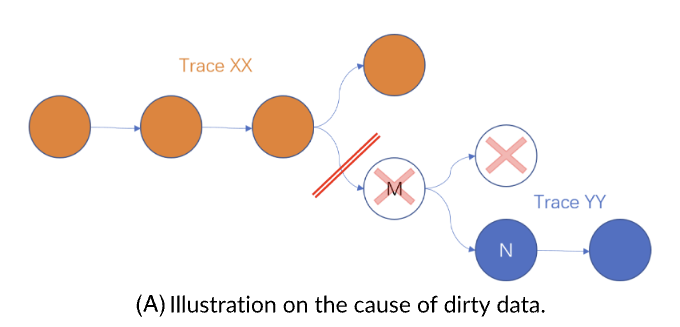
Figure 4 (A) – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
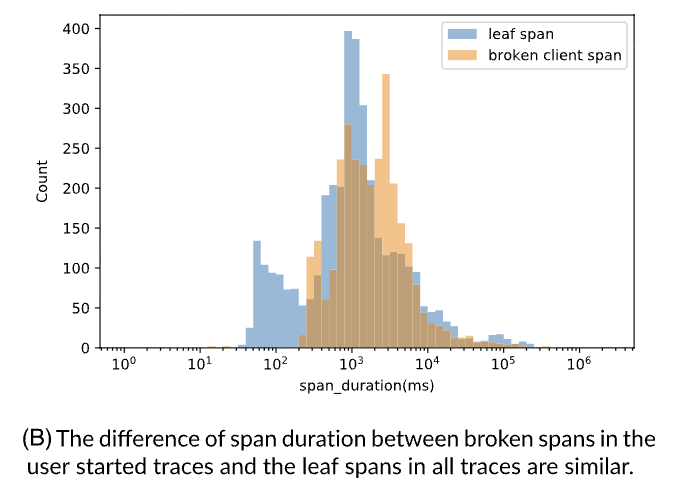
Figure 4(B) – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
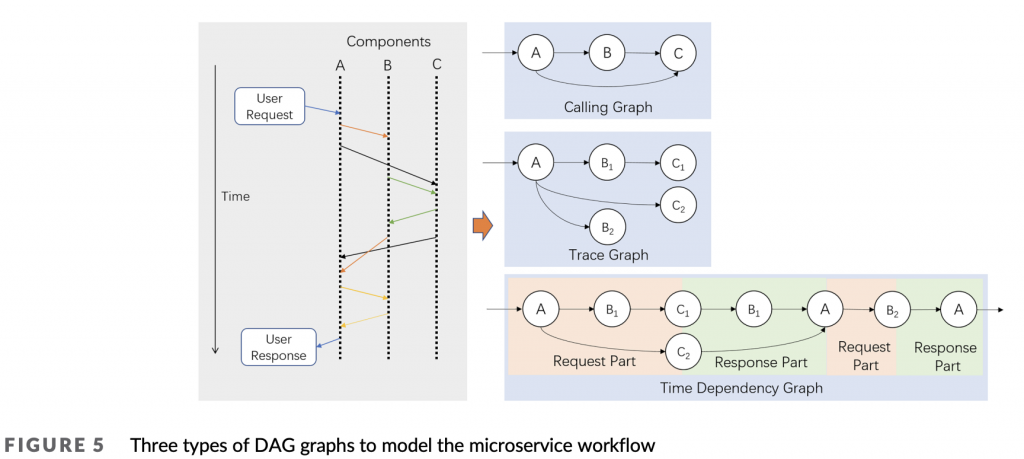
Figure 5 – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
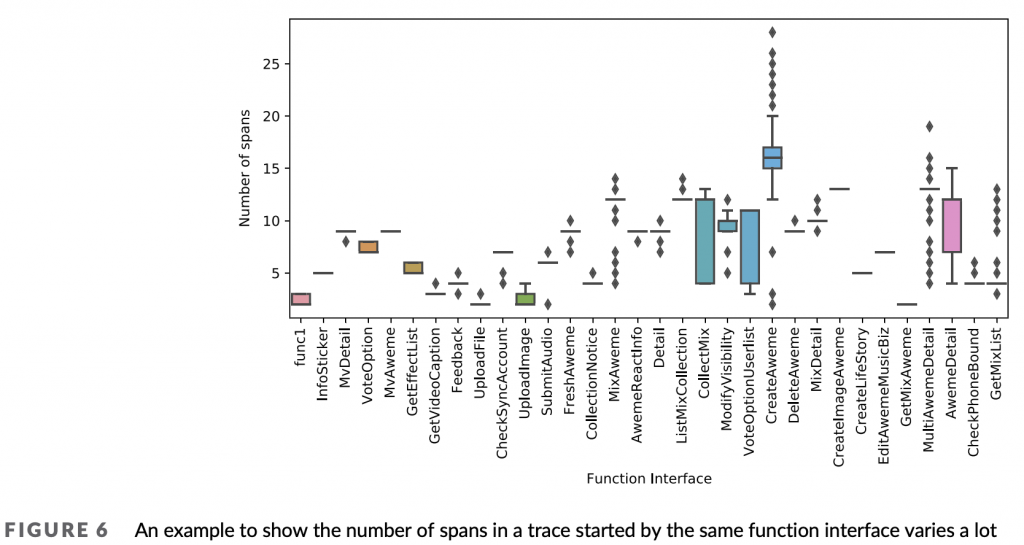
Figure 6 – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
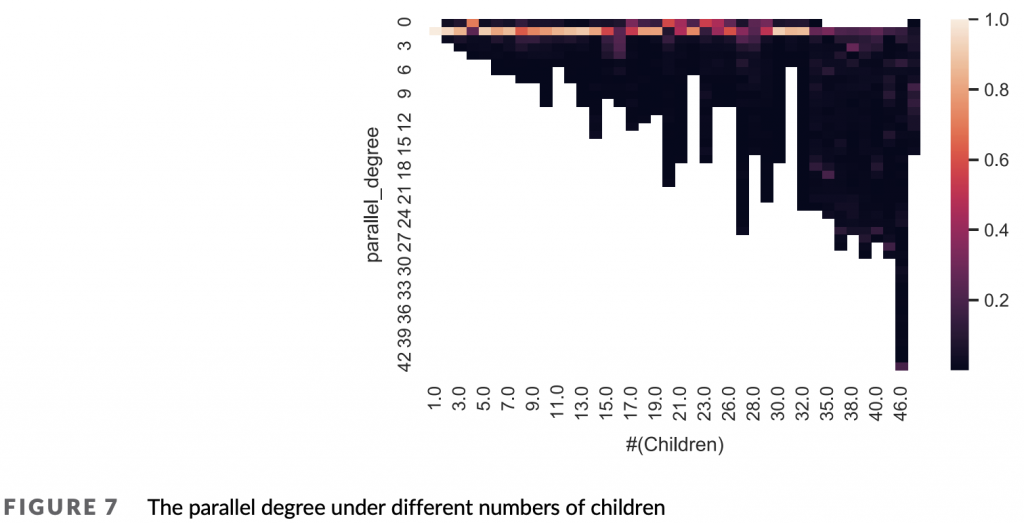
Figure 7 – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
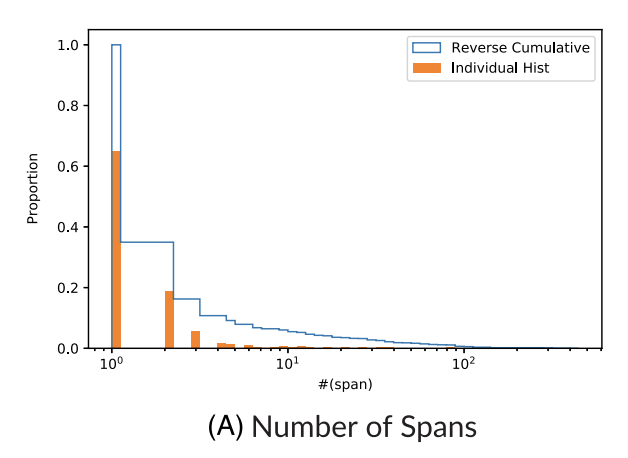
Figure 9 (A) – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
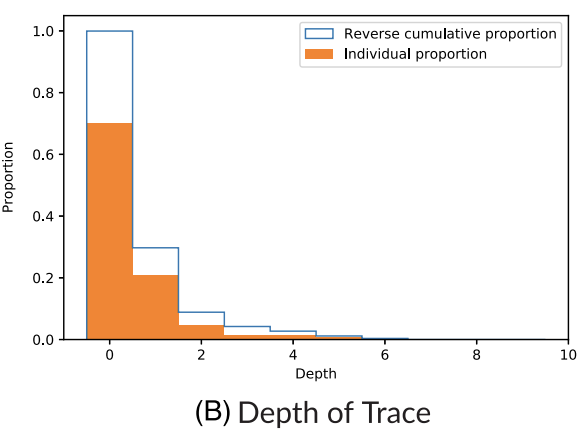
Figure 9 (B) – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
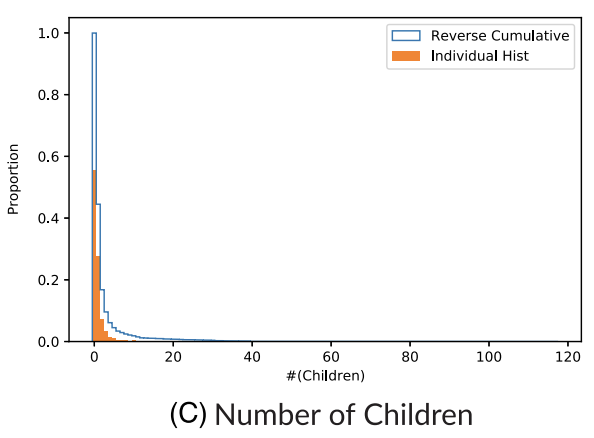
Figure 9 (C) – Wen Y, Cheng G, Deng S, Yin J. Characterizing and synthesizing the workflow structure of microservices in ByteDance Cloud. J Softw Evol Proc. 2022;34(8):e2467. doi:10.1002/smr.2467
コメントを残す